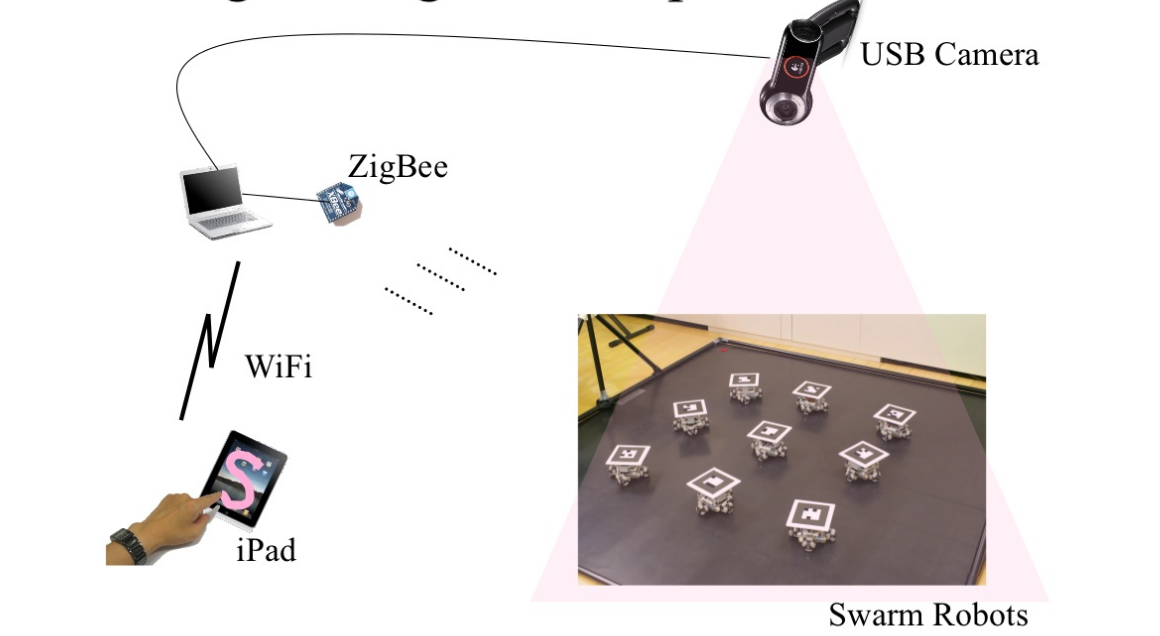
Multi-Robot Formation Control by self-made robots. The robot formation responds to the users shape drawn on a tablet. Robots are controlled by wireless communication with XBee and Arduino FIO. A USB camera is also used by the robots to recreate the curve indicated by the user.
Due to the expensive cost of buying robots, Keisuke built each robot himself using more affordable parts. Each robot has a small motor, omni-wheel, and Arduino. He even used legos to build the vehicles’ chassis.